Global Navigation Satellite System (GNSS) technology has transformed how we navigate and collect geospatial data. The Base and Rover stations are critical components of GNSS systems, as they provide accurate location data. In this blog article, we will look at the fundamentals of Base and Rover in GNSS, including their functions, interactions, and significance in various applications
Base Station
The Base Station is a fixed point in the GNSS network that acts as a reference for the entire system. It is also known as Reference Station. The base is usually placed in a known location with precisely measured coordinates. The location is pre-surveyed by either traditional methods or by GNSS observation for multiple days. This known position acts as a reference point against which the Rover’s position is determined.
The primary function of the base is that it serves as an anchor for calculating accurate positions by comparing the signals received from multiple satellites. The Base-station then provides error data for every observation compared to it’s known location.
Key Features of Base
Stability and Accuracy: It serves as a reference station that provides essential information for real-time positioning and data collection ensuring stability and precision in determining positions.
Continuous Operation: By continuously receiving signals from multiple satellites, it gives a steady reference for Rovers in their range.
Signal correction: It is yet another important feature provided by the base station. It receives signals from satellites and compares them with known reference points or models to identify any discrepancies or errors caused by factors like atmospheric interference or satellite clock errors.
Data Transmission: Base Stations send correction data to Rovers, which compensate for mistakes caused by air conditions, satellite orbits, and other variables.
Stability and Accuracy: It serves as a reference station that provides essential information for real-time positioning and data collection ensuring stability and precision in determining positions.
Continuous Operation: By continuously receiving signals from multiple satellites, it gives a steady reference for Rovers in their range.
Signal correction: It is yet another important feature provided by the base station. It receives signals from satellites and compares them with known reference points or models to identify any discrepancies or errors caused by factors like atmospheric interference or satellite clock errors.
Data Transmission: Base Stations send correction data to Rovers, which compensate for mistakes caused by air conditions, satellite orbits, and other variables.
Rover
The Rover is a mobile machine outfitted with a GNSS receiver that receives signals from multiple satellites to determine its precise position on Earth. It is not fixed to a known place and calculates its accurate position using satellite signals and Base Station correction data.
These are typically utilized when a surveyor wants to gather data, stakeout points, or create digital terrain models (DTM) on the building site. It is most commonly used for setting out property boundaries, gathering GPS data on the placement of cables, pipelines, and sewage drains, which is then exported via .DXF files into your AutoCAD system. In addition to rovers pinpointing exact areas, they are instrumental in measuring stockpiles and topsoil piles. They can also be used to establish Ground Control Points (GCP) for drone surveying. Tilt sensors are now standard on later versions. These also let you to slant your receiver pole, making more challenging situations accessible.
The Rover is a mobile machine outfitted with a GNSS receiver that receives signals from multiple satellites to determine its precise position on Earth. It is not fixed to a known place and calculates its accurate position using satellite signals and Base Station correction data.
These are typically utilized when a surveyor wants to gather data, stakeout points, or create digital terrain models (DTM) on the building site. It is most commonly used for setting out property boundaries, gathering GPS data on the placement of cables, pipelines, and sewage drains, which is then exported via .DXF files into your AutoCAD system. In addition to rovers pinpointing exact areas, they are instrumental in measuring stockpiles and topsoil piles. They can also be used to establish Ground Control Points (GCP) for drone surveying. Tilt sensors are now standard on later versions. These also let you to slant your receiver pole, making more challenging situations accessible.
Key Features of Rover
Portability: Rovers are meant to be portable, making them useful for a variety of purposes including surveying, agriculture, construction, and navigation.
Real-time Positioning: The rover calculates its position by processing signals from GNSS satellites. To improve accuracy, it receives correction data from the base station.
Dynamic Correction Reception: As the rover moves, it continuously receives correction signals from the base station. This dynamic correction ensures that the rover’s position remains accurate, even in changing environmental conditions.
Portability: Rovers are meant to be portable, making them useful for a variety of purposes including surveying, agriculture, construction, and navigation.
Real-time Positioning: The rover calculates its position by processing signals from GNSS satellites. To improve accuracy, it receives correction data from the base station.
Dynamic Correction Reception: As the rover moves, it continuously receives correction signals from the base station. This dynamic correction ensures that the rover’s position remains accurate, even in changing environmental conditions.
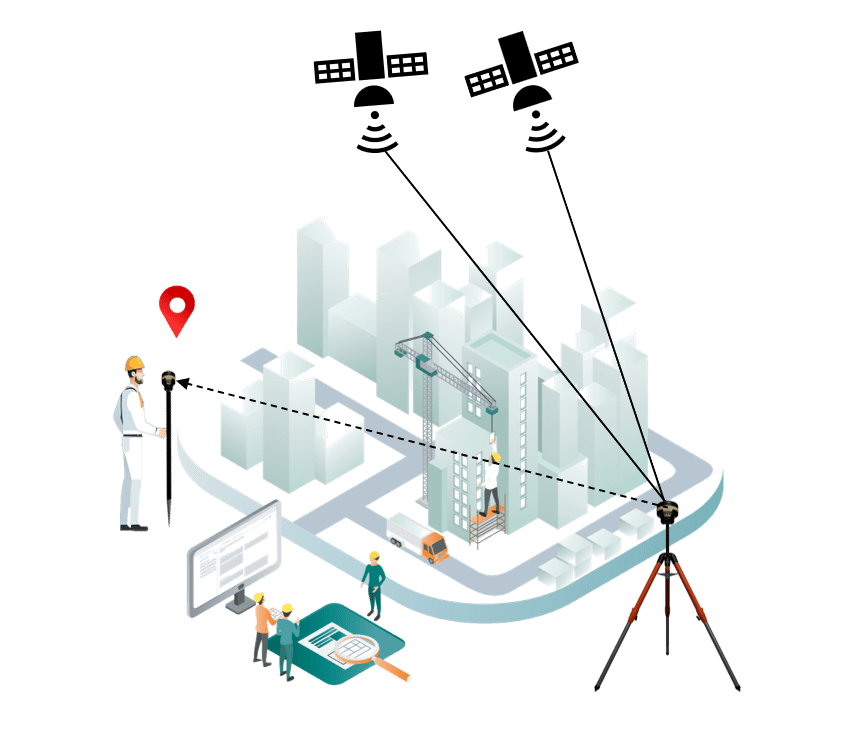
Base-Rover Interaction
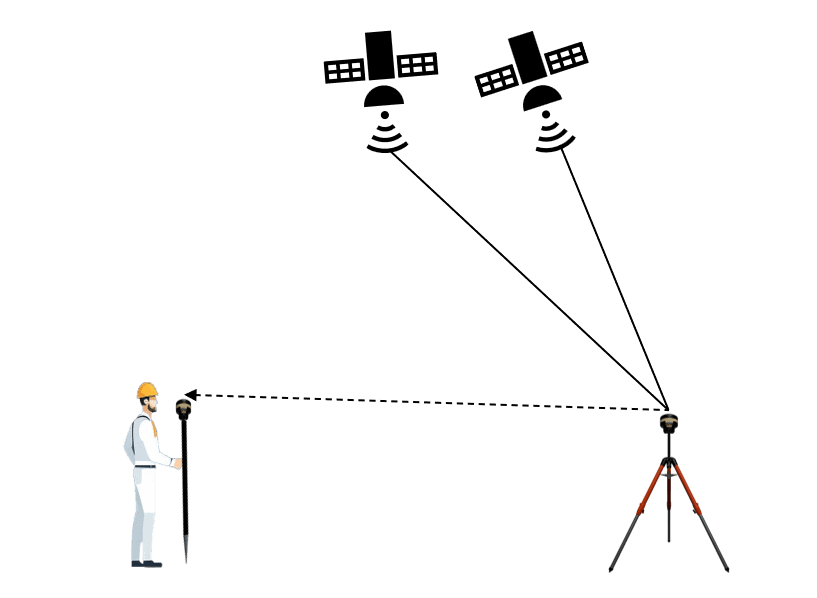
The key concept in the interaction between the base and rover is “differential correction.” The base station, having a known precise location, calculates the errors in the satellite signals it receives due to factors like atmospheric conditions and satellite clock errors. These error corrections are then transmitted to the rover in real-time (Real-Time Kinematic or RTK) or saved for post-processing.
The key concept in the interaction between the base and rover is “differential correction.” The base station, having a known precise location, calculates the errors in the satellite signals it receives due to factors like atmospheric conditions and satellite clock errors. These error corrections are then transmitted to the rover in real-time (Real-Time Kinematic or RTK) or saved for post-processing.
- In RTK, corrections from the base station are transmitted in real-time to the rover, enabling centimeter-level positioning accuracy.
- In post-processing, the data collected by both the base and rover are used after the survey is completed. The base’s precise location and the rover’s data are processed together to achieve high-precision results.
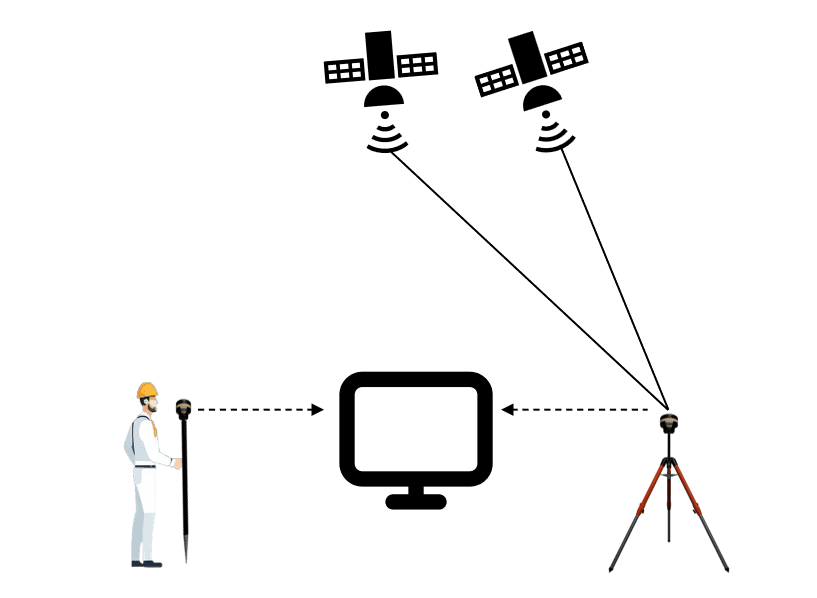
The rover applies these corrections to its own GNSS data, significantly improving the accuracy of its position calculations.
Communication between the base and rover is crucial for transmitting correction data. This communication can occur through radio links, cellular networks, or other wireless technologies, depending on the specific GNSS system in use.
Applications
Surveying and Mapping: GNSS technology with Base and Rover stations is widely used in land surveying and mapping applications, providing accurate and efficient data collection.
Precision Agriculture: Farmers use GNSS technology to optimize field operations, such as planting, harvesting, and irrigation, leading to increased productivity and resource efficiency.
Construction and Infrastructure Development: GNSS-enabled equipment with Base and Rover stations enhances the precision of construction activities, ensuring accurate positioning of structures and infrastructure.
Base and Rover stations form the backbone of GNSS technology, enabling high-precision positioning in various fields. As technology continues to advance, the applications of GNSS with Base and Rover stations are likely to expand, contributing to increased efficiency and accuracy in diverse industries.
