Global Navigation Satellite Systems (GNSS) such as GPS, GLONASS, and Galileo are critical in providing accurate location information for a variety of applications ranging from navigation and surveying to agricultural and emergency services. However, the precision of GNSS positioning is susceptible to a variety of faults that can jeopardize the dependability of location data. In this blog article, we will look at various forms of GNSS errors and how they affect accuracy.
These are the factors that may make it difficult for a GNSS receiver to calculate an exact position and degrade precision.
Satellite Clock Errors
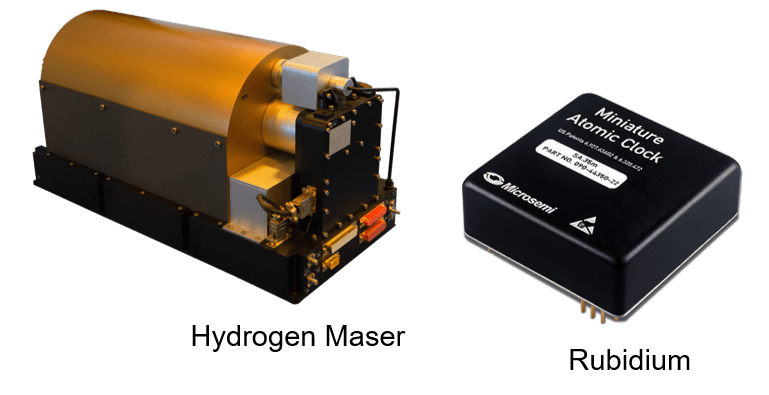
GNSS satellites are equipped with atomic clocks to provide precise timing signals.
However, variations in the satellite clocks can introduce errors in the ranging measurements, affecting the accuracy of position calculations. Different global systems use different types of atomic clocks, and most satellites will have multiple types of clocks on board. For e.g. Rubidium and Caesium are standard on GPS , Galileo has Hydrogen maser and Rubidium.
These clocks are incredibly accurate, but they aren’t perfect, and experience ‘drift’. This means they lose or gain one nanosecond for every three hours of time.
For example, 10 nanoseconds of clock error results in 3 meters of position error.
The figure above depicts the satellite clocks present in GALILEO GNSS
Orbit errors
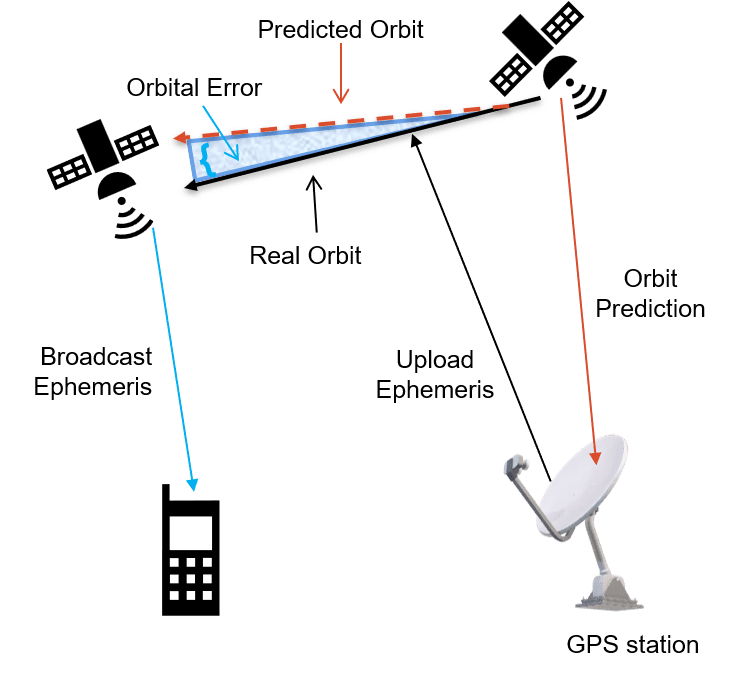
GNSS satellites travel in very precise, well-known orbits. However, like the satellite clock, the orbits do vary a small amount. Also, like the satellite clocks, a small variation in the orbit results in a significant error in the position calculated.
Orbital errors occur when the GNSS satellite is not exactly in the position that was predicted and transmitted through orbit data. Some GNSS surveying techniques require the final ephemerides to be used to guarantee the best solution for a position.
This error source can be reduced by means of relative measurement, or by post-processing when observed and post-processed orbit data of good quality are available.
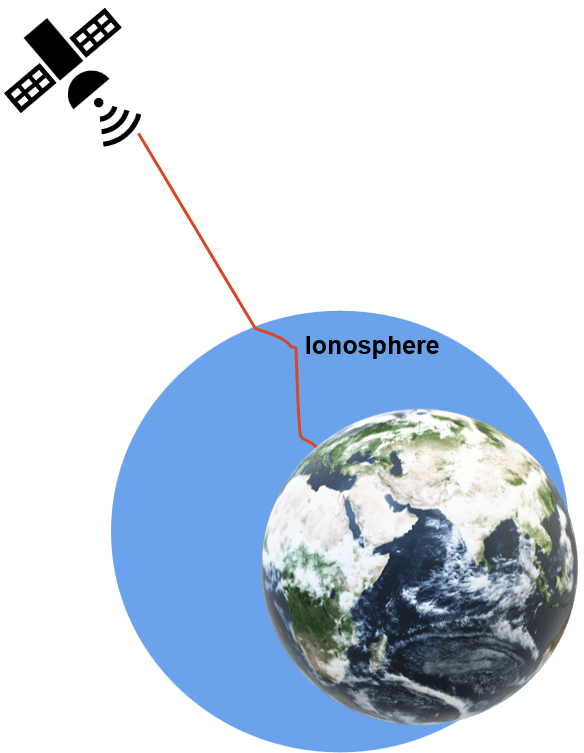
Ionospheric Delay
The ionosphere is the layer of atmosphere between 50 and 1,000 km above the Earth. This layer contains electrically charged particles called ions due to solar radiation. These ions alter the transmission time of the satellite signals and can cause a significant amount of satellite position error (typically ±5 meters). Modelling the ionosphere is highly variable and more difficult to model. This is generally the largest error source in GNSS measurement, but it can be reduced by using relative or multi-frequency measurement.
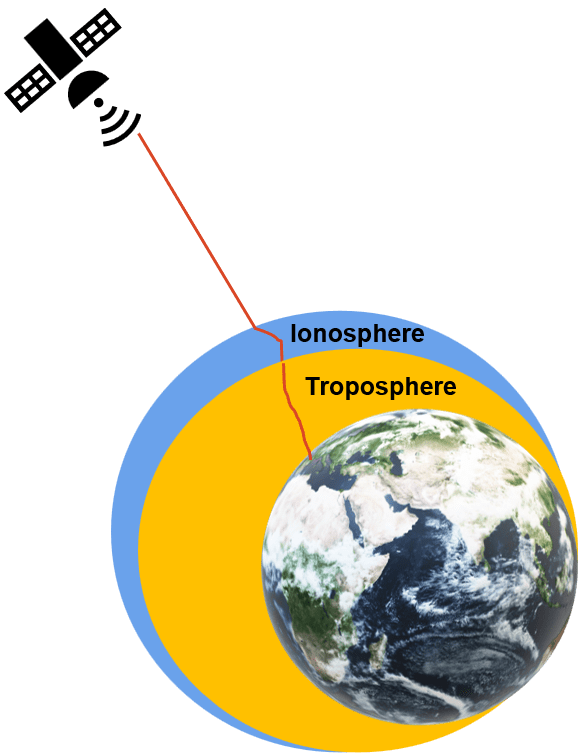
Tropospheric Delay
The troposphere is the layer of atmosphere closest to the surface of the Earth. It is approximately 8 and 14 km deep, depending on the location on the Earth’s surface. Tropospheric errors are caused by temperature, density, pressure or humidity changes.. Here, the GNSS signal is mainly affected by water vapour, which varies is a lot in time and space.
Multipath
Multipath error occurs when a signal from the same satellite reaches a GNSS antenna via two or more paths, such as reflected off the wall of a building. The reflected signal clearly has to travel further to reach the antenna and so it arrives with a slight delay. In an environment with tall houses or trees, multipath errors are more common. This error source can be partially reduced by observing over a longer period and with good quality GNSS equipment. Also, to reduce multipath errors place the GNSS antenna in a location that is away from the reflective surface.
Receiver Noise
Receiver noise refers to the position error caused by the GNSS receiver hardware and software. All GNSS receivers are subject to other radio waves that occur naturally or through other processes. These other radio waves, along with other types of electrical interference are what is known as background noise, and impact the ability of the receiver to ‘hear’ the GNSS signals. High-end GNSS receivers tend to have less receiver noise than lower-cost GNSS receivers. Calibration and signal processing techniques are employed to minimize these errors, but they can still impact accuracy.
Impact on Accuracy
Positional Inaccuracy: Cumulative effects of the mentioned errors can lead to significant inaccuracies in the calculated position. This is particularly critical in applications where precise positioning is essential, such as in aviation, surveying, and autonomous vehicles.
Time-to-First-Fix: Errors can also impact the time it takes for a GNSS receiver to acquire the first fix. In scenarios where rapid and accurate positioning is crucial, delays in acquiring a fix can have serious consequences.
Navigational Integrity: In safety-critical applications, like aviation, GNSS errors can compromise the navigational integrity of the system. This is why redundancy and augmentation systems are often used to enhance accuracy and reliability.
Increased Uncertainty: Users relying on GNSS for navigation or surveying may experience increased uncertainty in their results. This uncertainty can be a limiting factor in applications where precision is paramount.
While GNSS has revolutionized navigation and positioning, understanding and mitigating errors are crucial for ensuring accuracy. Users should be aware of the various error sources and employ techniques such as differential corrections, augmentation systems and the use of multiple constellations to enhance GNSS performance