Drones have come a long way in the survey and construction sectors, and their capabilities have greatly improved over time, making UAVs the surveyors’ best friend. Before diving into how to fly the drone, let’s ensure we understand the practice.
The automated drones are controlled using Ground Control Software (GCS). Ground Control Software is a tool for the user to control the drone. One should follow these steps for an efficient drone survey.
The initial phase for Drone Mapping is it’s Planning.
Planning
Planning is the most important step of the drone mapping. If done properly, flying drone on the field is a cakewalk. One of the better ways to plan a survey site is by creating KMLs beforehand. KML files store geographic data and are a great way to define flight area boundaries in Google Earth. Users can import the KML file as a polyline or polygon. Polylines can represent the line features and can be used for corridor mapping. Polygons can be used for general land surveys and to describe other polygon features.


Locate Your Site
Follow these steps before going to the field.
- Use Google Earth to get an idea of the survey site.
- Try to create a KML file of the site from the office itself. This will help the user to spend less time on the site and be more aware of the site.
- Prepare the GCP points before going to the field.
Setting up GCP Points
Ground control points (GCPs) are places on the ground with precisely known locations. GCPs are primarily used in projects that exclusively demand precision mapping, like construction, mining, topographic surveying, etc. You should use ground control points if your project requires high global accuracy. GCP points are measured through DGPS.
Generally, per sq km or 100 Hectares, 4–5 GCPs are more than sufficient to geo-reference raster data.
The thumb rule of placing the GCP is that wherever there’s an abrupt change in the terrain, you can place the GCP, and also, GCPs should be spread out uniformly throughout the terrain.

Obtaining high-accuracy survey-grade coordinates for your GCPs is critical.
Alternative to GCP
To improve the accuracy of the GNSS data, there are two techniques:
Real-Time Kinematic (RTK) is a GPS correction technology that provides real-time location data corrections when the survey drone captures site photos. Ground control points are unnecessary if you use an R.T.K. drone.
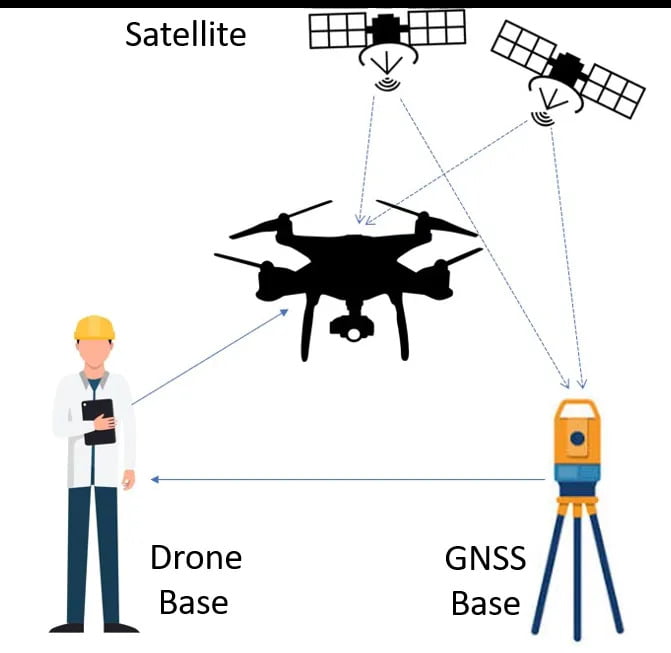
Above Figure shows the Real Time Kinetic (RTK) method. In this method, the satellites are communicating with the GNSS base station and the drone which acts as a rover. The GNSS base station communicates with the drone base and from the drone base station correction signals are sent to the drone.
Post Processed Kinematic (PPK) is another GPS correction technique that corrects location data after the drone data has been captured and uploaded.
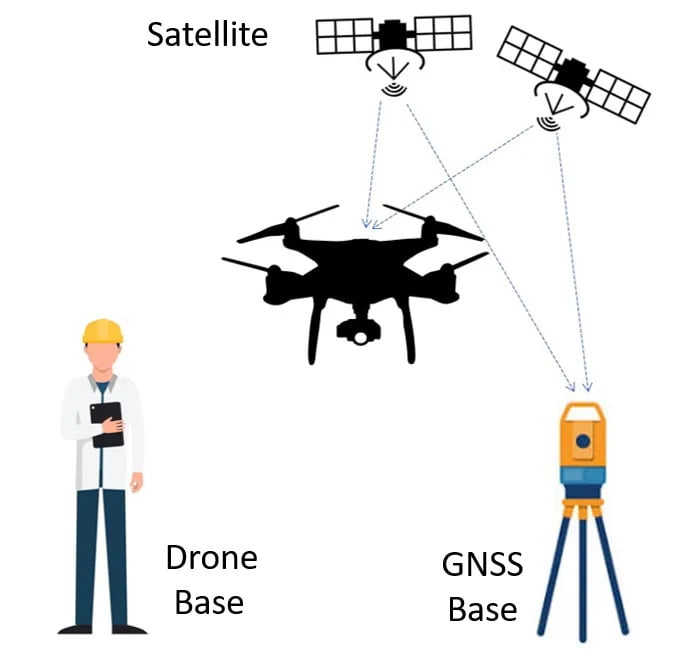
Figure 5 shows the Post Processed Kinematic (PPK) method. In this method, there is no communication between the GNSS base station and the drone.
Factors to keep in Mind when it comes to Accuracy
Camera Requirements
Resolution
The drone should have a higher resolution RGB camera with the capability to capture high-quality undistorted pictures. The more the resolution, the better the quality of the images.

ISO
ISO is the camera sensor’s sensitivity to light. A lower ISO value means less sensitivity to light, while a higher ISO is more sensitive. 400 ISO and below will provide good images.
Shutter Speed
It’s the speed at which the shutter of the camera closes. Shutter speeds between 1/240 and 1/1,200 should provide images without motion blur.
Drone Controls
Now, that you understand about camera, accuracy, GCPs, we can discuss a bit about the drone controls.
- Pre-Checks: Before each flight, it is mandatory to arm the drone to check whether the propellers are correctly locked. Make sure all the sensors are calibrated properly.
- Return To Home: The return to home option is to call the drone back to its home in case of emergencies while flying a mission.
- Land: It is used to land the drone at its current position. The drone will land at the position where the option was triggered by keeping the position locked and will land on the ground.
Last but not least, we will discuss the altitude at which the drone should be flown and how forward and side overlap affects the quality of the map.
- Altitude: It may also come as no shock that flying the drone at a higher altitude helps the camera cover more land area in a single image with fewer batteries and less time overall. This interprets more enormous possibilities for capturing distinctive features in multiple images. But the reciprocation is that the image’s resolution and accuracy will be compromised. Flying at low altitudes captures more details of the area. It also helps match common points while processing, increasing the image resolution and accuracy.
- Overlap: Each drone has a different field of view (FOV) based on the camera. This has consequences for mission planning, particularly for mapping missions that use overlap to determine flight paths.
Now, that you understand about camera, accuracy, GCPs, we can discuss a bit about the drone controls.
- Pre-Checks: Before each flight, it is mandatory to arm the drone to check whether the propellers are correctly locked. Make sure all the sensors are calibrated properly.
- Return To Home: The return to home option is to call the drone back to its home in case of emergencies while flying a mission.
- Land: It is used to land the drone at its current position. The drone will land at the position where the option was triggered by keeping the position locked and will land on the ground.
Last but not least, we will discuss the altitude at which the drone should be flown and how forward and side overlap affects the quality of the map.
- Altitude: It may also come as no shock that flying the drone at a higher altitude helps the camera cover more land area in a single image with fewer batteries and less time overall. This interprets more enormous possibilities for capturing distinctive features in multiple images. But the reciprocation is that the image’s resolution and accuracy will be compromised. Flying at low altitudes captures more details of the area. It also helps match common points while processing, increasing the image resolution and accuracy.
- Overlap: Each drone has a different field of view (FOV) based on the camera. This has consequences for mission planning, particularly for mapping missions that use overlap to determine flight paths.
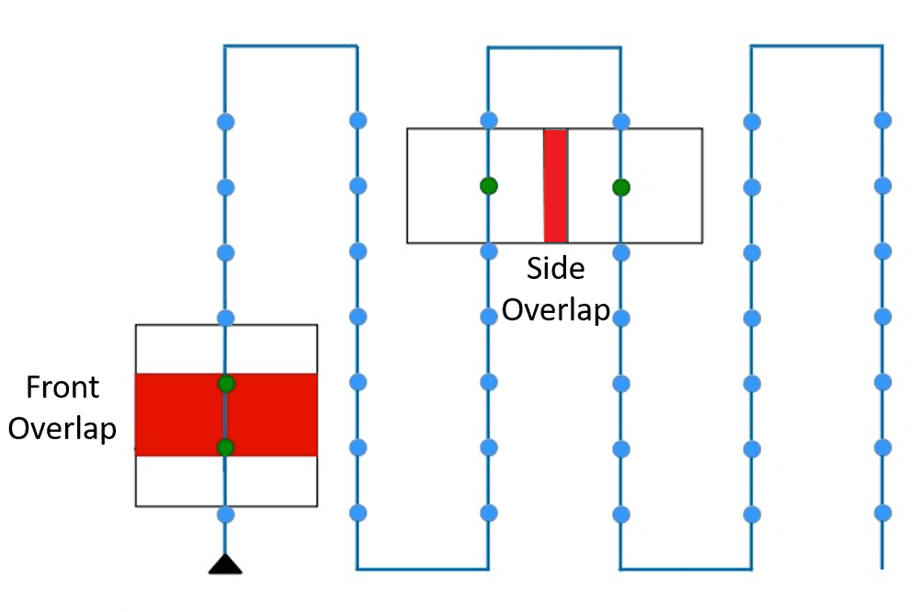
Overlap matches the features between photographs. There are two types of overlap:
Front Overlap: The overlap between successive photographs on a flight path is called front overlap. Increasing the front overlap makes the camera capture more photos quickly. It only affects the number of images.
Side Overlap: The overlap between photographs in adjacent parallel flight paths is called the side overlap. Increasing the side overlap gives more matched features in the imagery but reduces the area your drone can cover in one flight. The flight duration also increases as the number of lines increases.
Increasing the overlap for a flight creates more matched points and greater accuracy. Lower altitude and higher overlapping will increase the number of images and the time required for the flight, but worth it in the long run, as this helps obtain high-resolution images.
Now, we will continue in the next blog mentioning about some interesting facts related to Drone Mapping.
